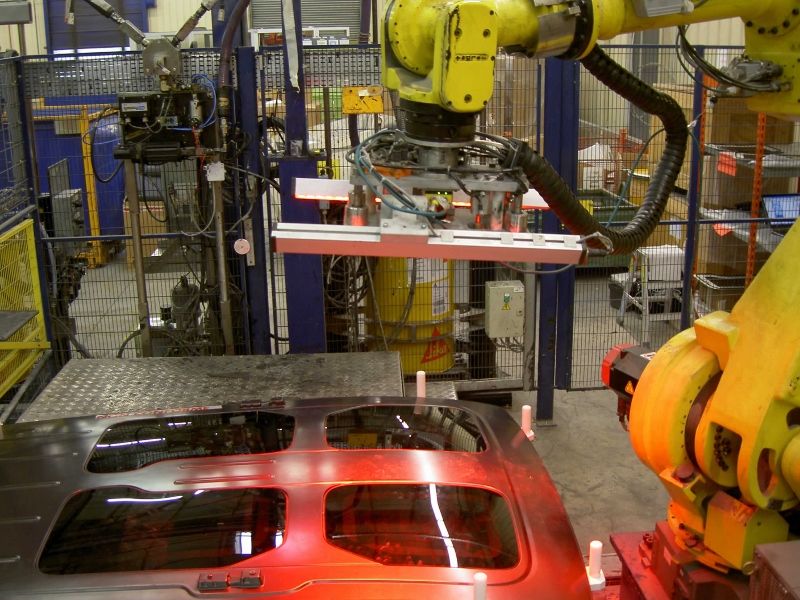
Pour la société CLEIA, j’ai programmé de nombreuses installations robotisées. J’ai formé et développé des installations robotisées pour prendre de tuiles sur des convoyeurs pour les placer dans des H ou des U de cuissons …
Ces applications de tracking nécessitent généralement plusieurs robots (selon la cadence) et un système de vision.